Teollisuusrobotiikan kehitys on viime vuosina ottanut merkittäviä kehitysloikkia erityisesti uusien softien ja digitaalisten ratkaisuiden kehittyessä ja muodostuessa kiinteäksi osaksi laitteistotoimitusta. Asiakkaan puolelta tulevina vaatimuksina robotiikan helppokäyttöisyys ja erilaiset mahdollisuudet etäkäyttöön, esimerkiksi valvonnan ja häiriötilanteiden hallinnan osalta, ovat usein investoinnin edellytyksinä.
Yaskawa tarjoaa nykyaikaisia ratkaisuja niin robotiikan helppoon käytettävyyteen ja liitettävyyteen muihin järjestelmiin kuin robotiikan etäkäyttöön ja -ohjelmointiin. Näistä ratkaisuista kerrotaan lisää seuraavissa kappaleissa.
Yaskawa MotoEasy, räätälöityja helppokäyttöinen soluohjain
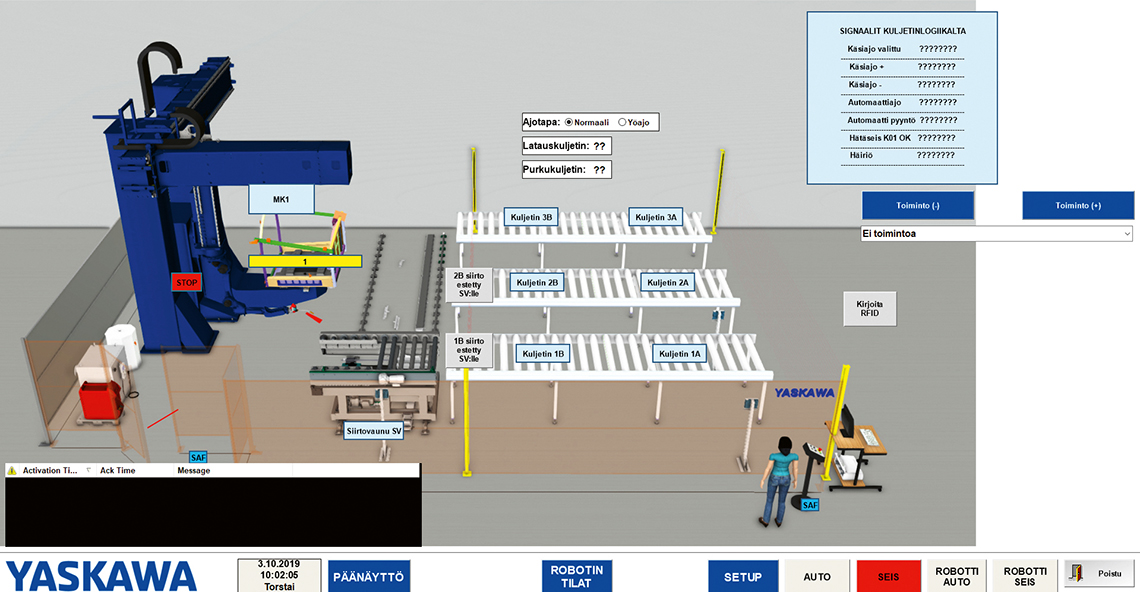
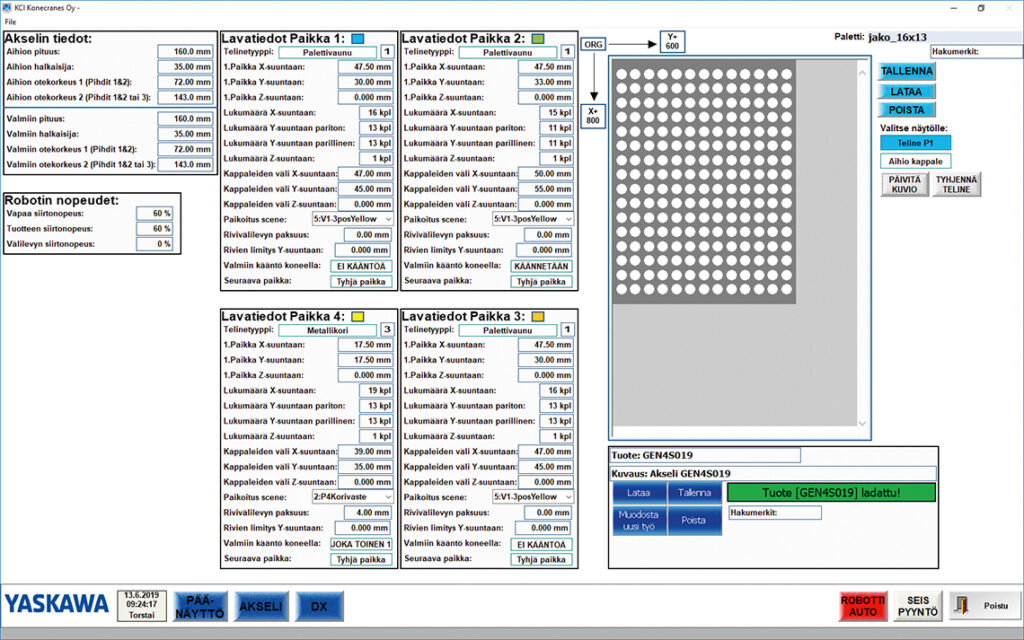
MotoEasy on helppokäyttöinen käyttöliittymä ja räätälöity soluohjain Yaskawan toimittamille robottijärjestelmille. Käyttöliittymä helpottaa robotin käyttöä ja näin järjestelmästä saadaan enemmän tehoa irti. Myös käytön oppiminen helpottuu käyttäjien vaihtuessa. Nopeampi käyttö ja ohjelmointi parantavat robotin käyttöastetta. MotoEasyn ansiosta tavallisella Windows PC:llä voidaan Ethernet-yhteyden kautta muun muassa ohjata robottia tai liittyä asiakasyrityksen toiminnanohjausjärjestelmään.
MotoEasy on täysin räätälöitävissä. Tämän ansiosta ohjelmalla pystytään vastaamaan moniin erilaisiin asiakkaan tarpeisiin. Yleisimpiä MotoEasy-käyttöliittymän käyttötarkoituksia ovat parametrinen robotin ohjelmointi, työjonojen luominen sekä monipuolinen järjestelmän ohjaus ja valvonta. Parametrisellä ohjelmoinnilla pystytään samankaltaisia tai -muotoisia tuotteita ohjelmoimaan nopeasti mittoja tai muita arvoja antamalla. Poiminta- ja lavauskuviot voidaan syöttää parametriseen ohjelmaan. Työjonoja hyödyntämällä robotti saadaan työskentelemään yhtäjaksoisesti pidempiä aikoja, esimerkiksi yön yli. Ohjelmat voidaan tallentaa myöhempää käyttöä varten PC:n muistiin. Isommissa järjestelmissä valvonta- ja ohjaustyökaluilla pystytään nopeuttamaan häiriöiden poistoon kuluvaa aikaa, kun PC:n näytöltä nähdään heti, missä kohtaa järjestelmää häiriö sijaitsee.
Monipuolisten tietokantayhteyksien ansiosta MotoEasyllä voidaan liittyä moniin erilaisiin toiminnanohjausjärjestelmiin ja muihin ”backoffice”-työkaluihin. Robotin soluohjain voi kuitata valmistuneet työvaiheet suoraan ERP-järjestelmään tai kutsua työjonot suoraan tietokannasta. Näin säästytään manuaaliselta työvaiheelta ja poistetaan virheen mahdollisuutta. Moniin erilaisiin tietokantoihin on mahdollista lukea ja kirjoittaa MotoEasy-soluohjaimen ansiosta. MotoEasy voi toimia myös yhdyskäytävänä robotin ja usean eri valmistajan PLC:n välillä.
Robotin käyttöpaneelin peilaus ’’Remote Pendant’’
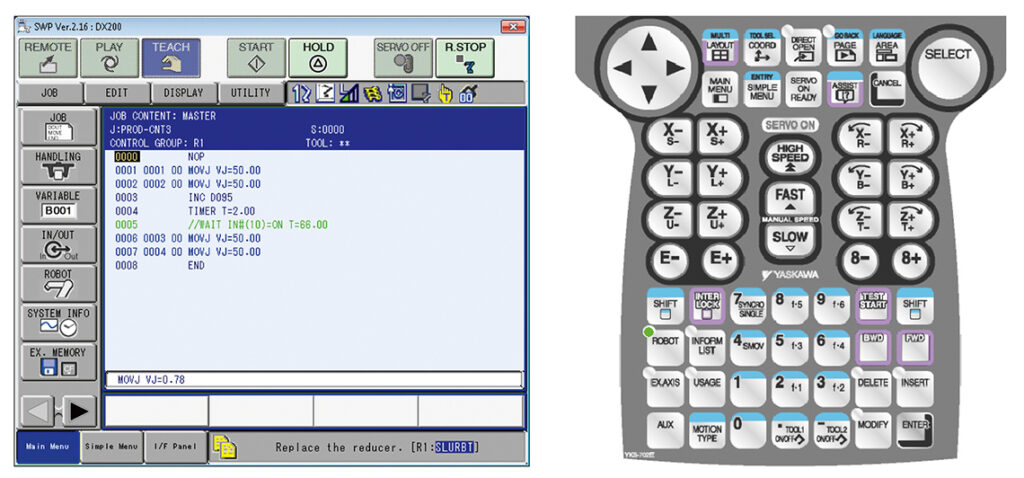
Teollisuusrobotin ohjaus tapahtuu perustilanteessa pendantiksi kutsutun ohjausyksikön kautta. Ohjausyksikkö on varusteltu kosketusnäytöllä ja painikkeilla robotin liikuttelemiseen sekä muuhun hallintaan. Ohjausyksikkö on mahdollista ottaa etäkäyttöön liittämällä robotin ohjauskaappi lähiverkon kautta PC:hen, jolloin ohjausyksikkö voidaan peilata PC:lle käyttämällä erillistä tähän tarkoitettua ohjelmistoa. Näin saadaan lähes identtiset toiminnot sekä näkymä ohjausyksiköstä ja reaaliaikainen näkymä robotin tapahtumista häiriötilanteineen. Muutokset esimerkiksi parametreihin tai sisäiseen logiikkaan onnistuvat tämän välityksellä menemättä paikan päälle tuotantosolun viereen.

Yaskawa MotoWeb
Robotin ohjauksen toimintojen valvontaan tarkoitettu Yaskawa MotoWeb sisältää muutamia keskeisiä toimintoja järjestelmien hallintaan. Verkkoselaimella toimiva applikaatio mahdollistaa robottikohtaisesti koneiden valvonnan. Selaimen kautta esimerkiksi käynnissä olevan työn valvonta tai vaihto onnistuu helposti. Lisäksi logiikkaa, hälytystietoja tai vaikka robotin sijaintia voidaan valvoa selainliittymän kautta. Varmuuskopiointi säännöllisesti on tärkeää esimerkiksi robotin töille, jotka sisältävät liikekäskyjä. Sekä varmuuskopiointi että tiedostojen hallinta onnistuu MotoWebin kautta. Mikäli halutaan tarkempaa tietoa robottisolujen työajoista, MotoWebin käyttöliittymästä saadaan selkeä graafinen näkymä. Näkymä voi olla esimerkiksi viikkomuodossa, jossa näkyvät eriteltynä aikoja – milloin servot ovat olleet päällä, milloin robotti on ollut liikkeessä ja niin edelleen.
Yaskawa HSE (High Speed Ethernet)
Jos robotin toimintaan halutaan päästä käsiksi vielä syvemmin, voidaan käyttää Yaskawan ”high speed ethernet” -kommunikaatioprotokollaa, jolla onnistuu ohjaimen sisäisen datan lähetys ja vastaanotto, monitorointi sekä kontrollointi. Käytännössä tällä vakio-ominaisuudella voidaan siis tehdä kaikki se, mitä robotin käsiohjaimellakin. Suuri osa Yaskawan omista ohjelmistoista perustuu ja toimii tätä protokollaa käyttäen ja ovatpa monet asiakkaatkin rakentaneet omia PC-käyttöliittymiään ja tiedonkeruujärjestelmiään robottien osalta HSE:n tuomien mahdollisuuksien ympärille.
Käytön helpottamiseksi on myös olemassa, niin ikään ilmainen High Speed Ethernet Client -ohjelmointirajapinta, josta löytyy valmiit palikat käyttöliittymien tekemiseen robotin kanssa kommunikoitaessa. Tämän APIn kehittämisessä tavoitteena on ollut eritoten käytön helpottaminen entisestään, joten esimerkiksi kolmannen osapuolen ohjelmissa tarvittavia kirjastoja sekä esimerkkejä on helposti saatavilla. Myös taaksepäin yhteensopivuutta riittää, sillä
HSE:tä tukee robotteja aina NX100-sukupolvesta lähtien (2004), joskin ominaisuuskirjo on luonnollisesti ajansaatossa parantunut.
Yaskawa Finland Oy
Jaakko Riihimäki
jaakko.riihimaki@yaskawa.eu.com

