Kehittyneillä etäohjelmointiohjelmistoilla voidaan yksinkertaistetusti sanoen opettaa robotille uusi työtehtävä samalla kun itse fyysinen laitteisto jatkaa tuotannon tekoa keskeytyksettä. Etäohjelmoimalla uusi tehtävä opetetaan tarkasti todellisuutta vastaavalle robottisolun mallille eli digitaaliselle kaksoselle. Tämä voidaan suorittaa varsinaista tuotantoa häiritsemättä ja uusi työtehtävä on valmis tuotantoa pysäyttämättä.
Robottien etäohjelmointi
Teollisuusrobottien ohjelmointi perinteisellä tavalla eli pisteitä opettamalla on säilynyt jo vuosikymmenien ajan tyyliltään pitkälti samana – toki kehitysaskeleita on tälläkin osa-alueella tapahtunut matkan varrella ja työkaluja löytyy helpottamaan pisteiden opetusta paikan päällä robottisolussa erilaisista helppokäyttöisistä ohjainyksiköistä ja hallintalaitteista lähtien. 3D-mallintamisen yleistyminen valmistavassa teollisuudessa sekä 3D-CAD-ohjelmistojen kehitys on kuitenkin avannut tilaisuuden vauhdittaa ohjelmointityötä sekä kasvattaa robottien käyttöastetta.
Perusperiaatteita etäohjelmoinnista simulaatiomallin avulla
Etäohjelmointi-, offline-ohjelmointi- tai OLP-ohjelmointi-termejä käytettäessä tarkoitetaan robotin liikeratojen ohjelmointia varsinaisen tuotannon ulkopuolella katkaisematta tuotantoa. Toisin sanoen, robotti jatkaa olemassa olevaa työkiertoa ja tuotteiden valmistusta ja ohjelmointityö siirretään PC:lle, jossa ohjelmoidaan tulevaa tuotesarjaa. Offline-ohjelmoinnin kohderyhmänä on tällä hetkellä erityisesti kaarihitsaus, leikkaus sekä maalaus. Ohjelmointi keskeyttämättä tuotantoa tukee vahvasti Lean-tuotantomallia, jossa opettamalla ohjelmointiin käytettävä aika katsotaan ’’hukkana’’. Varsinkin alihankintateollisuudessa asiakastoiveiden huomioiminen helpottuu, koska pienet tuotantosarjat on mahdollista toteuttaa etäohjelmoinnin avulla lyhyellä aikataululla joustavasti.
Etäohjelmointi mahdollistaa simulointimallissa ohjelmistosta riippuen esimerkiksi törmäystarkastelun, joka helpottaa huomattavasti ohjelman läpikäyntiä ja validointia ennen tuotantoon vientiä. Operaattorilla on mahdollisuus tarkastella tuotetta sekä suunnitella ohjelmointi järkevämmin 3D-ympäristössä, koska ohjelmistot mahdollistavat tuotteen tarkastelun paikoista, joihin varsinaisessa tuotannossa ei välttämättä ole mahdollista päästä. Robotisointiin kannattamattomat tuotteet on mahdollista hylätä ennen tuotantoon siirtämistä. Valmistusajan simulointi tuo tehokkuutta tuotannon suunnitteluun ja mahdollistaa tuotteen valmistuksen kustannuksien laskemista. Koska etäohjelmointi perustuu 3DCCAD-ympäristöön se tuottaa aina tasaista laatua robottiohjelmien osalta ja mahdollisesti pystyy poistamaan inhimillisiä virheitä kun työkalun kuljetus vakioituu.
Hitsattavan tuotteen robottiradat muodostuvat usein suuresta joukosta pisteitä, jotka operaattorin on opetettava piste kerrallaan – esimerkiksi robotin lähestyminen, hitsauksen aloituspisteet, kaariliikkeet jne. Offline-ohjelmointi mahdollistaa parhaillaan tämän koko hitsausradan generoimisen yhdellä tai muutamalla hiiren painalluksella. Tämä perustuu 3D-CAD-mallien geometrian ja muototiedon hyödyntämiseen, jossa offline-ohjelmisto laskee mallin perusteella oikean liikeradan robotille. Etäohjelma generoi robotille ohjelmakoodin, joka siirretään robottijärjestelmään useimmiten lähiverkossa, jonka jälkeen operaattori suorittaa tarvittaessa hienosäätöjä varmistamaan laatua, mikäli se koetaan tarpeelliseksi tai aloittaa uusien robottiohjelmien tuotantoajon. Operaattorille tehtäväksi jää käytännössä tuotteesta olevan 3D-mallin tuonti etäohjelmistoon, jonka jälkeen operaattori voi alkaa muodostamaan ohjelmaa tuotteen ympärille robottisoluun.
Yaskawa Finland Oy toimittaa monipuolisia hitsausrobottijärjestelmiä, joista vielä muutama vuosi sitten suhteellisen harva oli varustettuna etäohjelmoinnilla. Kehitystä tällä osa-alueella on tapahtunut ja tällä hetkellä valtaosaan toimitetaan jompikumpi seuraavaksi esiteltävistä offline-ohjelmistoista.
Yaskawa MotoSim EG-VRC – saumaton yhteensopivuus robottivalmistajan järjestelmiin
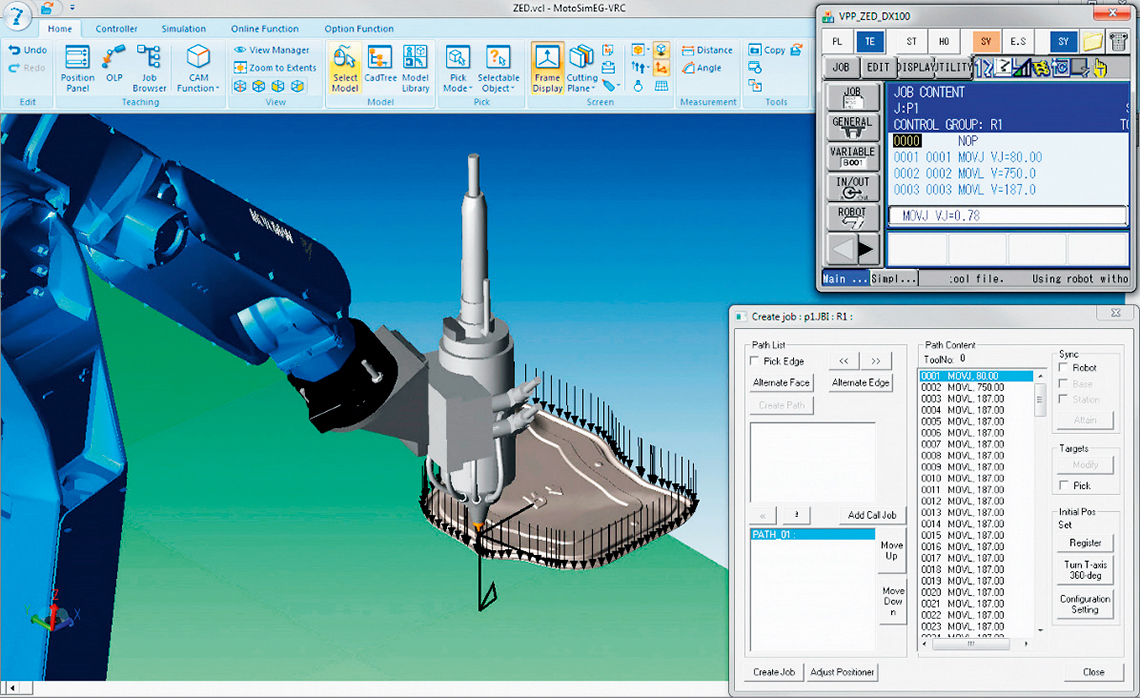
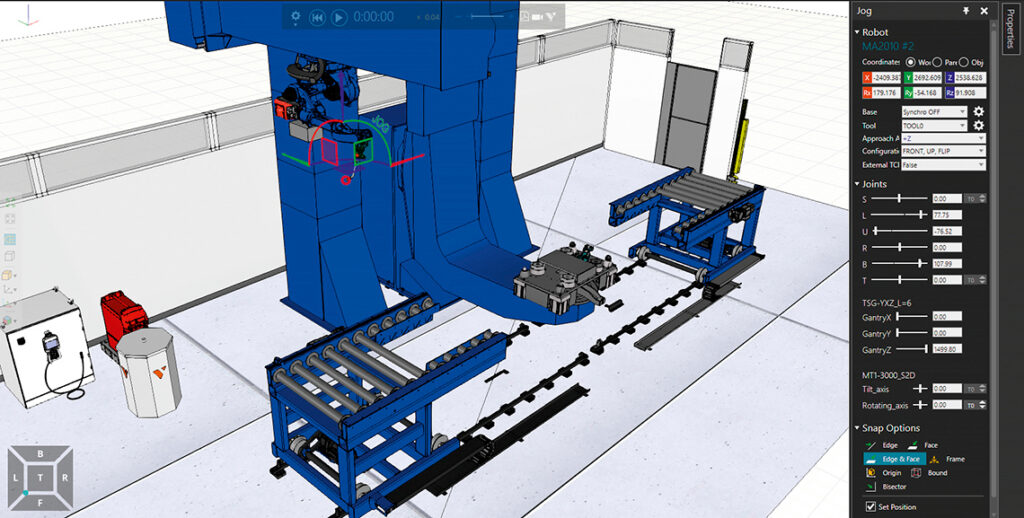
MotoSim on Yaskawa-konsernin oma tuote, joka on kehitetty tuomaan robottiympäristö tuotannosta PC:lle sisältäen identtisen kopion tuotantosolusta kaikkine toimintoineen. MotoSimillä on mahdollista hallita usean Yaskawa-robotin järjestelmiä sisältäen robotit, robottiradat, kappaleenkäsittelylaitteet ja suuret gantry-portaalit. Ohjelmisto sisältää 3D-simulointimallin robottisolusta sekä erilaiset työkalut liikeratojen generointiin sekä muokkaukseen.
Offline-ohjelmointitoiminnot
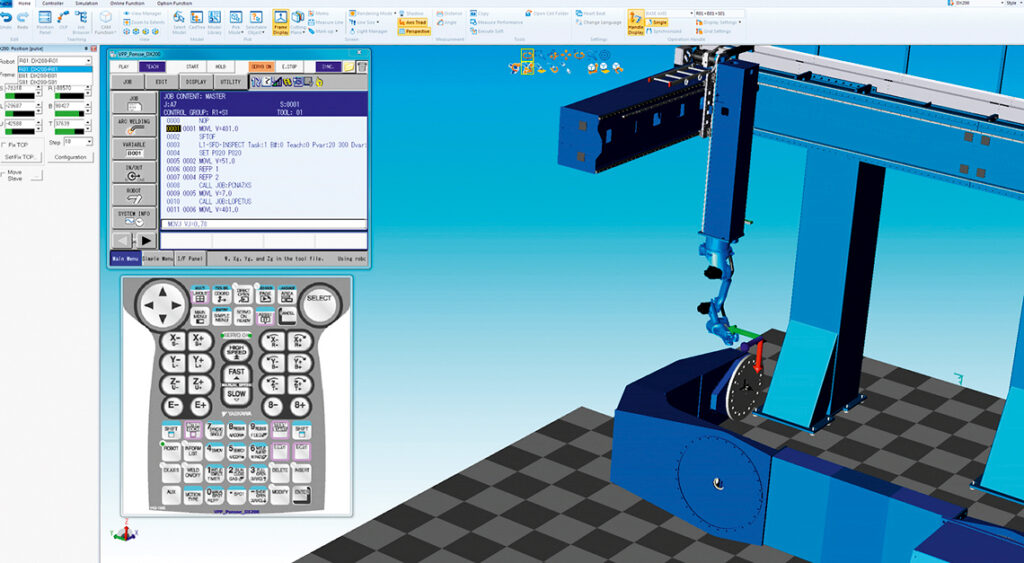
MotoSimin keskeisimmät CAM-toiminnot (tietokoneavusteinen suunnittelu) eli parametrit ja säädöt, jolla mahdollista generoida robottiradat on suunniteltu kaarihitsaukseen, pistehitsaukseen, leikkaukseen, kappaleenkäsittelyyn sekä maalaukseen. Nämä sisältävät esiasetuksia ja parametreillä voidaan säätää esimerkiksi polttimen asentokulmaa hitsauksen aloituksessa tai vapaalangan mittaa robottiohjelman hitsauspisteissä. Hitsausohjelmointia tehdessä niin kutsuttu ’’ohjainkahva’’ mahdollistaa robotin pisteiden opetuksen samalla periaatteella kuin tuotantosolussa. Näkyviin on mahdollista laittaa robottiohjausyksikön virtuaalinen näkymä, joka kokeneelle robottikäyttäjälle on helppo omaksua. CAM-toiminnot luovat automaattisesti polkuja robotin liikkeille ja mikäli robotin konfiguraatiossa tuotantosolussa on tehty asetuksia hitsaukseen liittyen, nämä voidaan huomioida myös 3D-ympäristössä. Laserrailonhaku sekä -seuranta ovat uusia sovelluksia hitsausrobotiikkaan ja näiden hallinta onnistuu myös MotoSimissä.
Koska MotoSim tukee Yaskawa-robotteja natiivisti, keskustelu PC:n ja robottisolun välillä on aukotonta ja MotoSim:ssä on mahdollista seurata robotin toimintoja reaaliajassa esimerkiksi hitsauksen aikana ja valvoa mm. mahdollisia hälytyksiä tuotantosolussa. Keskeisimpiin toimintoihin kuuluu muun muassa 3D-PDF:ien tulostus esimerkiksi asiakasyhteistyössä esiteltäväksi, robotin liikeratojen visuaalinen tarkastelu ’’rautalankamallilla’’, robottikoodin eli syntaksin virheiden tutkiminen etukäteen (esimerkiksi robotin liikkeiden rajoitusten tutkiminen) sekä Yaskawa- erikoistoiminnot kuten turvakuutioiden ja alueiden tarkastelu. Ohjelmisto tukee yleisempiä formaatteja kuten STEP, IGES, Inventor, Solidworks jne.
Toiminta Yaskawa Finland Oy:lla
Yaskawa Finland Oy:n hitsausrobottitoimituksiin MotoSim-varustettuna kuuluu ohjelmistolisenssi, robottiympäristön mallintaminen 3D-ympäristöön, robotin ja muun laitteiston kalibrointiin, käyttöönotto asiakkaan tiloissa tuotannossa sekä koulutus ohjelmistoon operaattoreille/käyttäjille. Joissain tilanteissa asiakkaan toiveena on myös ollut muutama valmis etäohjelmarunko saamaan tuotantoa reippaammin käyntiin. Koulutus sisältää ohjelmiston perusteita, ohjelmoinnin sekä 3D-ympäristön hallinnan harjoittelua. Yaskawa Finland Oy:n toimittamat järjestelmät etäohjelmointi yhdistettynä ovat menneet komponenttivalmistajille Suomen lisäksi Baltiaan esimerkiksi työkoneiden lisälaitteiden, traktorien sekä henkilöautojen perävaunujen ja muiden pienempien komponenttien valmistukseen. MotoSim-ohjelmiston laajan Yaskawa-sopivuuden myötä myös vanhempiin järjestelmiin on tehty tuotantosolujen mallinnuksia, jolloin vanhemmastakin robottiasemasta saadaan nykyaikainen järjestelmä ohjelmoinnin osalta. Ohjelmisto kehittyy jatkuvasti varsinkin CAM-toimintojen osalta uusille sovelluksille.
DelfoiARC – kotimaista osaamista hitsauksen etäohjelmointiin
Espoossa pääkonttoriaan pitävä Delfoi Oy toimittaa Delfoi Robotics -tuotteita Pohjoismaihin, Länsi-Eurooppaan, Venäjälle sekä Yhdysvaltoihin. Näistä tuotteista viimeisimpänä on hitsaukseen Delfoi ARC 4.3 -ohjelmisto. Yhtiöllä on pitkä historia ja kokemusta etäohjelmoinnista ja ensimmäinen järjestelmä on toimitettu jo vuonna 1990 Valmet Automotivelle. Heidän asiakkainaan teollisuudessa ovat mm. OEM asiakkaina Ponsse, John Deere, Häggblom sekä muita lukuisia kaarihitsausrobotteja käyttäviä yrityksiä ja sopimusvalmistajia. Asiakasyritykset edustavat myös laajasti erilaisia teollisuudenaloja autoteollisuudesta, koneenrakennus-, teräsrakenne- ja muovi- sekä komposiittituotteiden valmistukseen.
DelfoiARC 4.3
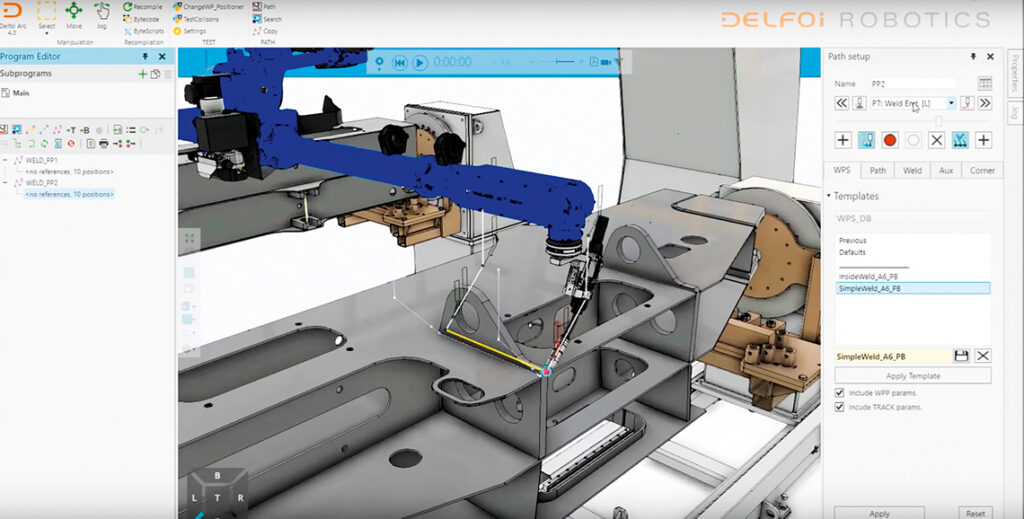
Ohjelmiston päätarkoituksena on mahdollistaa hitsausratojen nopea luominen virheettömästi parametrisuuteen ja piirrepohjaisuuteen perustuvien wizard-toimintojen kautta. DelfoiARC 4.3 toimii Visual Components 4.3 -alustalla, joka sisältää simulointiympäristön robottien, käsittelylaitteiden ja muiden oleellisien komponenttien osalta.
Edistyneet toiminnallisuudet hitsausohjelmien generoimiseen
Ominaisuuksina DelfoiARCista löytyy muun muassa generointityökalut suorille sekä kaareville hitseille, Autoseam-toiminto kaareville ja kaksoiskaareville hitseille, railonhakutoiminnot perinteiselle lankahaulle sekä laserrailonhaulle, monipalkohitsien luonti, hitsauksen prosessiparametrien hallinta sekä WPS-hitsaustietopankki.
DelfoiARCin käyttöliittymällä voidaan tarkastella robotin liikkeitä hitsausradan aikana ennen simulointia, ja tehdä tarvittavia korjaustoimenpiteitä esimerkiksi poltinkulmien säätöön, nurkkahitsausten pisteiden paikkojen säätöä tai vaikka railonhakujen kontaktipisteiden siirtoa. Yksi ohjelmointia huomattavasti nopeuttava toiminto on robotin ulkoisten akseleiden laskenta (eli robotin rata sekä kappaleenkäsittelylaite), jolla haluttu hitsausasento saadaan samalla kun hitsausrata generoidaan kappaleelle. Ohjelmisto laskee kaikkien akseleiden asennon railomuodon mukaan esimerkiksi ala- tai yläpienaan. DelfoiARC sisältää myös monipuoliset työkalut valmiiksi luotujen ratojen kopiointiin ja peilaamiseen. Ohjelmistoa kehitetään jatkuvasti. Tällä hetkellä uusia toimintoja ovat edellä mainittujen lisäksi alla olevat toiminnallisuudet.
Automaattinen, törmäysvapaan liikeradan suunnittelu
Ohjelmiston algoritmit ratkaisevat robotille liikeradat niin, ettei robotin käsivarsi tai työkalu/poltin törmää esteisiin. Lisäksi radan suunnittelu etsii ratkaisut, ettei nivelrajoja ylitetä eikä minkään nivelen nopeus tai kiihtyvyys ylitä sallittuja arvoja. Ratkaisu soveltuu etenkin avoimien teräsrakenteiden robotisointiin ja yksittäistuotteille.
Automaattinen hakujen generointi
Ohjelmisto mahdollistaa railonhakujen automaattisen generoinnin.
Jigitön hitsaus
Jigitön hitsaus mahdollistaa kahden tai useamman robotin synkronisen ohjelmoinnin. Kappaleenkäsittelyrobotti korvaa kappaleen paikotuslaitteen ja pitää hitsattavan kappaleen jatkuvasti halutussa hitsausasennossa, esimerkiksi jalkoasennossa, kun hitsausrobotti hitsaa.
TEKLA-integraatio ja automaattinen ohjelmointi
Teräspalkkien ja muiden yksittäisten rakenteiden hitsaus on mahdollista myös yksittäisille tuotteille. TEKLA-integraation avulla teräsrakenteiden suunnittelu- ja hitsaustieto voidaan lukea Delfoi ARC -ohjelmistoon, jossa hitsaustieto muutetaan automaattisesti hitsausrobotin ohjelmaksi.
Hitsausjärjestyksen automaattinen luominen
Ohjelmisto mahdollistaa lämmöntuonnista aiheutuvien muodonmuutosten minimoinnin jo ohjelmien tekovaiheessa niin, että muodonmuutokset olisivat mahdollisimman vähäisiä.
Delfoi ARC Yaskawa Finland Oy:lla
Yaskawa Finland Oy toimittaa Delfoi ARC -tuotteita hitsausjärjestelmien yhteydessä hyvin pitkälti samalla periaatteella kuin MotoSim-ohjelmistoa. DelfoiARC on havaittu hyväksi ratkaisuksi ja nopeuttamaan etäohjelmointia merkittävästi varsinkin järjestelmissä, mihin liittyy useampia ulkoisia akseleita. Robottiympäristön layout tuotantoon suunnitellaan Yaskawalla, jonka jälkeen järjestelmä asennetaan ja käyttöönotetaan. 3D-mallinnus tuotantosoluun tehdään usein ennen käyttöönottoa ja käyttöönoton yhteydessä 3D-mallinnus tarkastetaan ja kalibroidaan tarkaksi täsmäämään todellisuutta. Viime vuosien aikana asiakkaille on myös tarjottu satunnaisesti etäohjelmointia eli robottihitsausohjelmia uusiin järjestelmiin, sekä vanhojen olemassa olevien modernisointia ohjelmoinnin osalta. Tämä sisältänyt 3D-mallinnuksen, robotin kalibroinnin, DelfoiARC-kalibroinnin sekä koulutuksen.
Yaskawa Finland Oy
Jaakko Riihimäki
jaakko.riihimaki@yaskawa.eu.com
www.yaskawa.fi

